 SCIENCES DE L'INGENIEUR
SCIENCES DE L'INGENIEUR
Niveau : Terminale générale, enseignement de spécialité SI
Niveau : Terminale générale, enseignement de spécialité SI
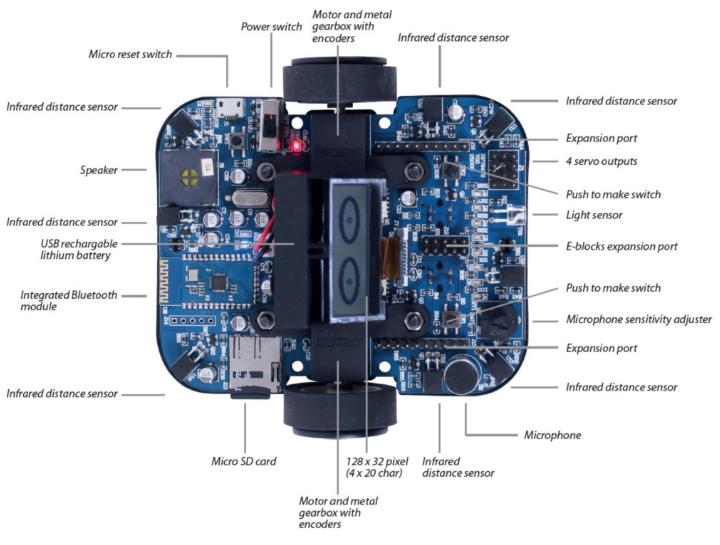
Le robot Formula All Code est conçu par Matrix. Il est contrôlé par une liaison Bluetooth. Il est équipé de plusieurs capteurs d’obstacle infrarouges, deux détecteurs de ligne et un microphone. Deux motoréducteurs permettent au robot de se déplacer dans toutes les directions.
Les commandes sont transmises par une chaine de caractère en émulant un port série RS232.Les commandes sont transmises par une chaîne de caractères en émulant un port série RS232. Par exemple :
moteurs (-100,100) permet au robot de tourner sur lui-même à vitesse maximale.moteurs(50,50) fait avancer le robot à 50% de sa puissance.avance(100) permet de spécifier la distance en millimètres que doit parcourir le robotDiagramme des exigences :

Objectifs : vérifier la précision de déplacement du robot ainsi que sa vitesse maximale.

Le fabricant a placé un aimant à 6 pôles, comportant 3 pôles Nord (points rouges) et 3 pôles Sud (points verts), sur l'axe secondaire du moteur. Lorsque ces aimants passent devant le capteur (à effet hall), un signal électrique noté S change de niveau logique comme suit :
Q1. Dessiner l'allure du signal de la sortie S du capteur lorsque le moteur effectue 1 tour.
Le compteur du robot va compter les changements d’état de la sortie S, totalisant ainsi transitions par tour.
Le moteur est accouplé à un réducteur dont le schéma est représenté ci-dessous.

Nombre de dents des engrenages :
Z2 = 32 Z4 = 33 Z6 = 35 Z8 = 38 Z1 = 15 Z3 = 14 Z5 = 13 Z7 = 10
Q2. Calculer le rapport de réduction du réducteur et comparez-le à la valeur du diagramme des exigences.
$r={Z_?*Z_?*Z_?*Z_?}/{Z_?*Z_?*Z_?*Z_?}$ $r=(?xx?xx?xx?)/(?xx?xx?xx?)$ $r=?$
Q3. Combien de tours doit effectuer le moteur lorsque la roue fait un tour complet ? Calculer ensuite le nombre de transitions Nc, générées par le codeur magnétique.
Calcul de N pour un tour de roue :
Q4. Relever le rayon de la roue du robot indiqué dans le diagramme des exigences.
Calculer la précision du déplacement du robot en millimètres.
$diamond$ Mesure du diamètre de la roue : D = $diamond$ Calcul de la circonférence de la roue: C = $diamond$ Calcul de la précision : P =
Q5. Calculer le nombre Nc de transitions comptées par le codeur pour un déplacement de 0.2m.
Nombre de transitions : N =
Téléchargez le fichier de simulation FormulaHP.msim.
Q6. Le robot est alimenté par une batterie de 3,7V ayant une capacité Q=200mAh. Paramétrer le modèle de la batterie avec ces valeurs.
Modifier le Rayon de la roue puis le rapport de réduction du réducteur r.
Le hacheur permet de définir la vitesse du moteur en pourcent. Lorsqu'on exécute la commande avance(500),
le robot va avancer de 500mm à une vitesse prédéfinie de 50%. Paramétrer le bloc de référence
constante1 du hacheur à cette valeur. Placez une sonde et calculer le
rapport cyclique simulé et la tension moyenne appliquée au moteur.

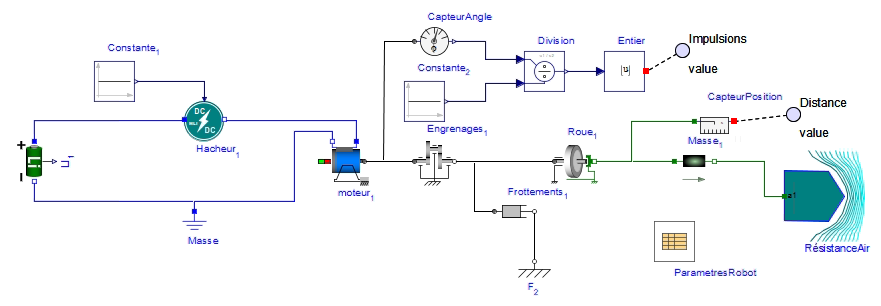
Q7. Dans le modèle ci-dessous, expliquer comment on simule le comptage du nombre de transitions en fonction de l'angle (en degrés) de rotation du moteur.

On veut simuler le déplacement du robot sur 0.2m :
Q8. Relever le nombre de transitions Nsim simulées pour un déplacement de 0.2m. Calculer la précision Psim, puis calculer l'écart relatif entre la précision attendue dans le diagramme des exigences et simulation. Conclure sur la validité du modèle.
$diamond$ Nombre de transitions Nsim : $diamond$ Calcul de la précision Psim : $diamond$ Ecart entre l'attendu et le simulé :
Q9. Relever le nombre de transitions Nmes, mesurer le distance réelle parcourue, puis calculer la précision Pmes et l'écart relatif entre l'attendu et le simulé.
$diamond$ Nombre de transitions Nmes = $diamond$ Distance mesurée dmes = $diamond$ Précision : Pmes = $diamond$ Calcul de l'écart relatif entre l'attendu et le mesuré :
Modifiez le modèle de simulation pour imposer une vitesse à 100%.
Ajouter une sonde permettant de relever la vitesse de déplacement du robot noté Vsim.
Calculer l’écart entre la vitesse maximale indiquée dans le Diagramme des exigences et la vitesse simulée Vsim.
$diamond$ Vsim = $diamond$ Calcul de l'écart relatif entre l'attendu et le simulé :
motor(100,100).
$diamond$ temps écoulé = $diamond$ Angle mesuré = $diamond$ Calcul de la vitesse du robot : Vmes = $diamond$ Calcul de l'écart relatif entre l'attendu et le mesuré :
Proposez une autre méthode pour mesurer la vitesse du robot progressant sur le sol.
Contenu
sous licence CC BY-NC-SA 3.0
Pascal Hassenforder 05/11/2020
Mise à jour le 02/04/2026