 SCIENCES DE L'INGENIEUR
SCIENCES DE L'INGENIEUR
Niveau : Terminale générale, enseignement de spécialité SI
Niveau : Terminale générale, enseignement de spécialité SI
Les moteurs permettent de transformer une énergie électrique en une énergie mécanique de rotation. Il se trouvent dans la chaîne d'énergie.
Complétez les flux du schéma blocs ci-dessous :

Tout moteur électrique est composé :
- d'un rotor, partie
- d'un stator, partie
Le moteur à courant continu possède un collecteur pour alimenter les bobines afin de créer un champ électromagnétique dans le rotor qui sera mis en rotation, attiré par l'aimant permanant ou électromagnétique du stator. La mise en rotation est assurée par le collecteur qui va alimenter la bobine suivante. Une inversion de polarité permettra au moteur d'inverser le sens de rotation.
Le moteur est caractérisé par sa puissance électrique, mécanique, sa vitesse de rotation et son couple. Il peut être accouplé à un réducteur pour augmenter le couple et diminuer la vitesse de rotation.
Il est alimenté par un courant continu et sa vitesse de rotation dépend de la tension en volts, le couple est proportionnel au courant absorbé.
Le couple étant proportionnel au courant on donne la relation suivante :
C = K'·I avec K’ qui est le coefficient de couple ou constante de fabrication (donnée constructeur).
Le modèle simplifié du moteur est le suivant :
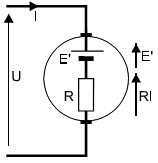
U = R·I + E’
E' va déterminer la vitesse de rotation N du moteur :
E' = Ke·N
donc U = R·I + Ke·N
Avec :
Comme U = R·I + Ke·N alors
U – R·I = Ke·N
Avec:
La variation de la vitesse n d’un moteur à courant continu est obtenue en faisant varier la valeur moyenne de la tension d’alimentation U.
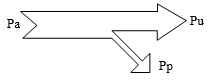
La puissance absorbée par le moteur est : Pa = U·I
La puissance utile que fournit le moteur est : Pu = E’·I
On définit le rendement du moteur par la relation :
Cu est le couple utile que fourni le moteur Pu = Cu·ω
ω est la vitesse angulaire (en rd/s) : ω = 2 π·N
N est la vitesse de rotation (en tr/s)
Bilan des puissances :
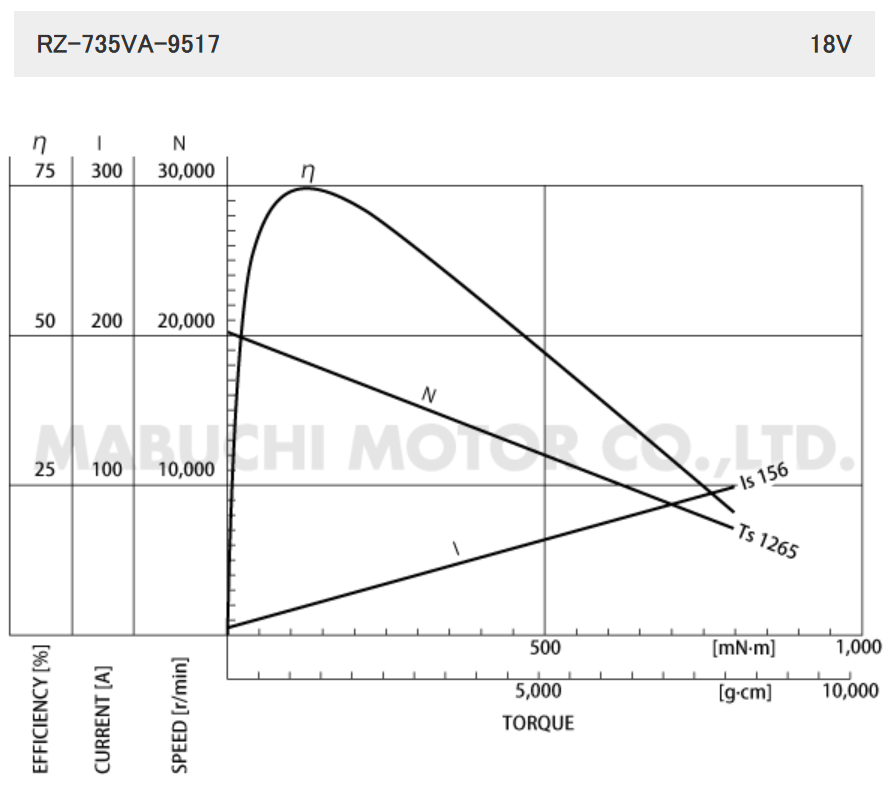
Exemple d'exploitation des caractéristiques d'un moteur de perceuse électroportative

| MODELE | TENSION | SANS CHARGE | AU RENDEMENT MAXI | BLOQUÉ | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ENTRE | NOMINALE | VITESSE | COURANT | VITESSE | COURANT | COUPLE | PU | COUPLE | COURANT | ||||
| V | V | tr/min | A | tr/min | A | mN·m | g·cm | W | mN·m | g·cm | A | ||
| RZ-735VA | 9517 | 6 - 20 | 18 | 20400 | 2.8 | 17990 | 20.9 | 149 | 1523 | 281 | 1265 | 12895 | 156 |
1. Calculer la puissance Pa absorbée par le moteur lorsqu'il fonctionne à son rendement maximum
2. Le constructeur donne la valeur de R=0.11Ω calculer la constante moteur Ke et préciser son unité
3. Relever dans le tableau la puissance utile Pu, puis calculer le rendement du moteur
4. Relevez graphiquement les valeurs du courant, de la vitesse et du rendement lorsque le moteur doit délivrer un couple de 300mN.m
5. A partir des résultats précédents, calculer la puissance utile Pu
On peut utiliser une tension continue variable mais le rendement peut être mauvais.
Pour résoudre ce problème, on utilise un hacheur : créer une Modulation de Largeur d’Impulsion (MLI) ou PWM (Pulse Width Modulation). Cette solution apporte un rendement proche de 100% quelle que soit la vitesse du moteur.
La MLI fait varier le rapport cyclique d’une tension ce qui fait aller plus ou moins vite le moteur.
La valeur moyenne de Um = α·Umax avec :
La période T du signal soir être inférieure à 15ms
Calculez les rapports cycliques des 2 signaux électriques ci-dessous, puis la valeur moyenne Um lorsque Umax=24V :
 | |
|
| |
Le schéma électrique ci-dessous permet de réaliser un hacheur commandé par E1 lorsque E2=0.
A1 et A2 sont des amplificateurs de courant commandés par les entrées E et E2.
Les amplificateurs L293D sont conçus à partir de transistors et leur courant maximal ne devra pas dépasser 0,6A.

Exemple 1 :
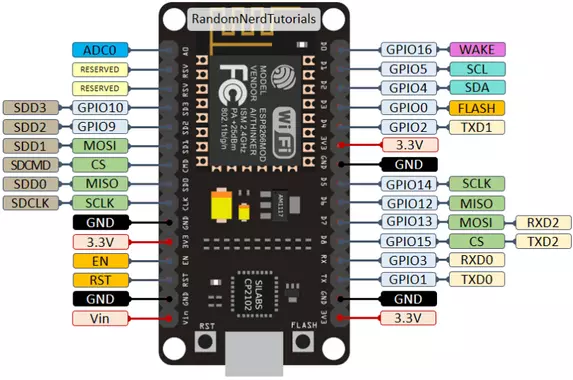
Le signal électrique E1 peut être généré par la broche GPIO4 d'un microcontrôleur ESP8266.
Le signal électrique E2 (GPIO5) doit être à zéro afin de relier la sortie de A2 à la masse (GND).
Le programme qui suit permet de réaliser une MLI avec un rapport cyclique α=20% :
 |
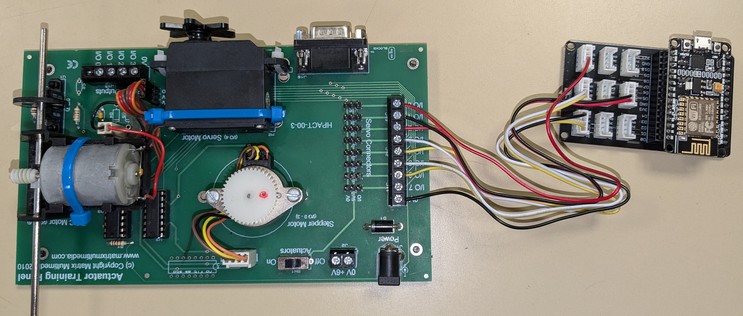
Relier la carte d'essai moteurs à l'EPS8266 et raccorder un bloc d'alimentation réglé à 6V
Modifier le programme pour générer un rapport cyclique α = 0.8.
Le gros inconvénient de ce programme c'est qu'on ne peut rien traiter d'autre tant qu'on est bloqué dans la boucle while.
Exemple 2 Sans boucle while :
En pratique, on recommande d'utiliser des fréquences comprises entre 20 kHz et 100 kHz pour commander des moteurs à courant continu. l'ESP8266 possède des sorties PWM sur toutes les broches GPIO.
On importe l'objet PWM qui possède une méthode duty(x) permet de générer une MLI de manière discontinue, avec l'argument x qui est un entier variant de 0 à 1023, pour un rapport cyclique α variant de 0 à 100%.
α généré avec la valeur 204 du programme, en déduire la valeur de TON et de la période T du signal MLI ainsi généré.α = 0.8.Pour inverser le sens de rotation de manière électrique, on utilise la structure du pont en H suivante :
Les amplificateurs A1 et A2 commandés par E1 et E2 permettent de changer le sens de rotation du moteur
| Exemple d'Algorithme | Complétez le programme ci-dessous |
|---|---|
 |
Un servo-moteur permet de faire tourner l'axe du moteur d'un angle précis. Cette position est maintenue tant que la consigne ne change pas.
Il comprend un système d'asservissement de position avec un capteur d'angle
Exemple de la voiture télécommandée :
L'angle imposé au servo-moteur va permettre de changer la direction du véhicule

Le servomoteur possède 3 broches :
Le signal de commande doit être un signal de type MLI de 50 Hz.

La durée du temps haut va faire varier l'angle de consigne du moteur. Exemple :
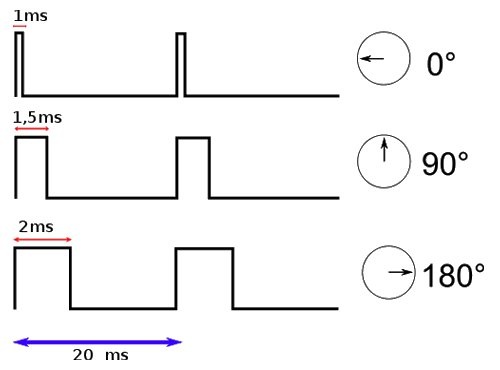
ATTENTION : les durées des impulsions peuvent changer selon les caractéristiques données par le constructeur
On donne les caractéristiques constructeur suivante, d'un servo moteur FS5109M :

| Plage de la tension d'alimentation | 4.8V à 6.0V | |
|---|---|---|
| Plage de l'impusion de commande | 500 à 2500 µs | |
| Angle | 0 à 180° (500 à 2500 µs) | |
| tension | 4.8V | 6V |
| Vitesse (Secondes pour 60°) | 0.18 | 0.16 |
| Plage du couple maximum (kg/cm) | 9 | 10.2 |
| Courant de repos (mA) | 5 | 7 |
| courant de déplacement à vide (mA) | 160 | 190 |
| Courant de blocage (A) | 1,5 | 2 |
1. Déterminer la valeur la durée de l'impulsion pour un angle de 90° et le rapport cyclique α
2. Calculer la durée en secondes pour effectuer les 90° lorsque le moteur est alimenté sous 4,8V
3. D'après l'oscillogramme ci-dessous, Déterminez l'angle qui a été programmé

4. Complétez le programme ci-dessous correspondant au déplacement de 0 à 90°.
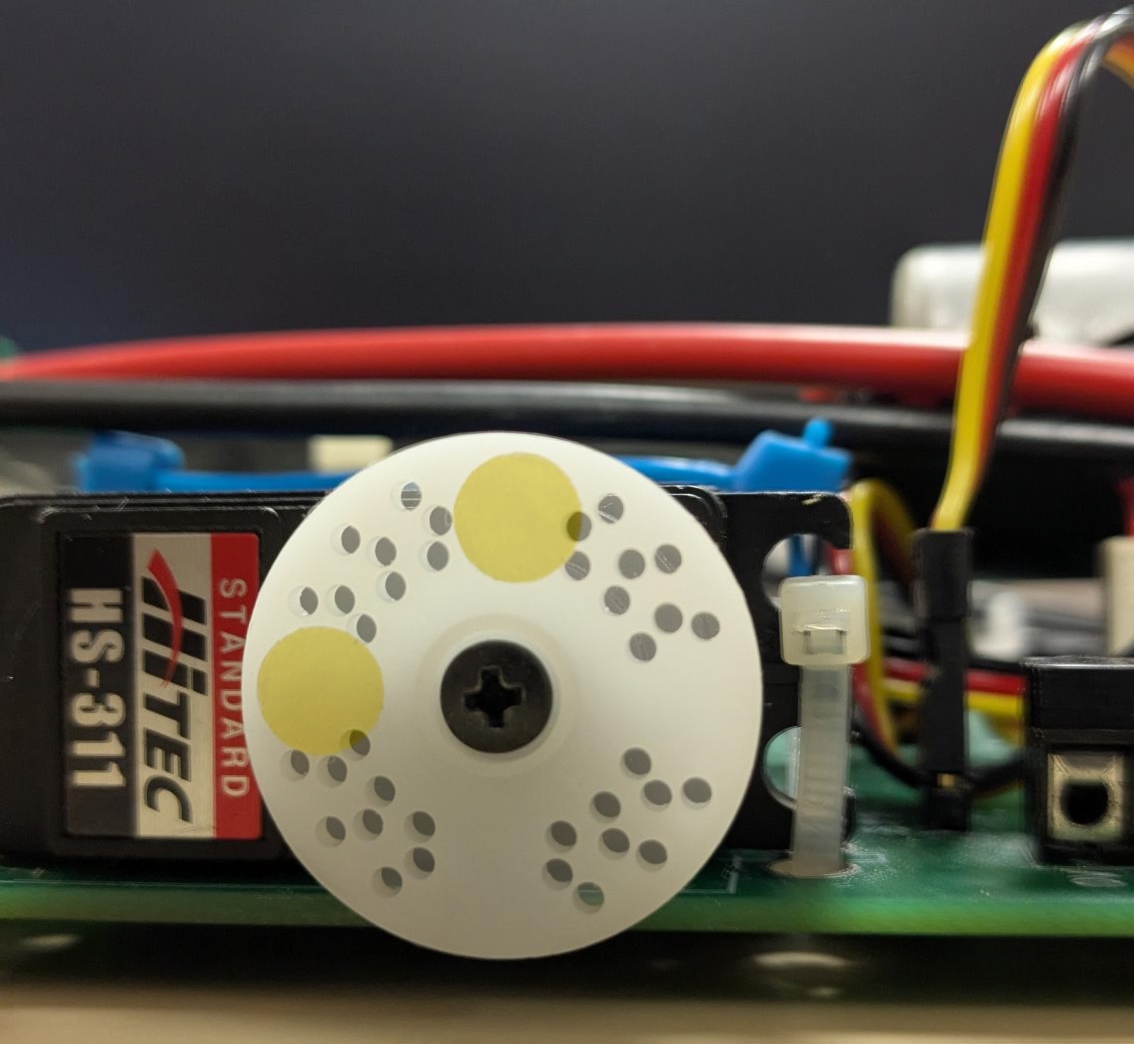
5.Enregistrez l'image suivante dans vos documents et avec le logiciel Kinovéa, avec l'outil angle, mesurer l'angle entre les deux positions, puis calculer l'erreur relative entre la valeur attendue et la valeur mesurée.

Le moteur pas à pas, comme son nom l’indique, avance par pas.
Un pas est un angle. Cette valeur d’angle de pas (de 0.00001° à 90°) dépend du moteur choisi. On fait donc tourner l’axe en indiquant au moteur combien de pas il doit faire.
Exemples d’utilisation : imprimantes 3D, tables de traçage, machine de découpe laser, système médical du type pousse-seringue, ...

Le principe de fonctionnement est d’alimenter successivement les différentes bobines dans le moteur pour que l’axe magnétique s’aligne avec le champ magnétique généré par les bobines.
Les moteurs pas à pas s’appellent « Steppers » en anglais. Leur pilotage se fait par des transistors intégrés dans une puce : UNL2003A
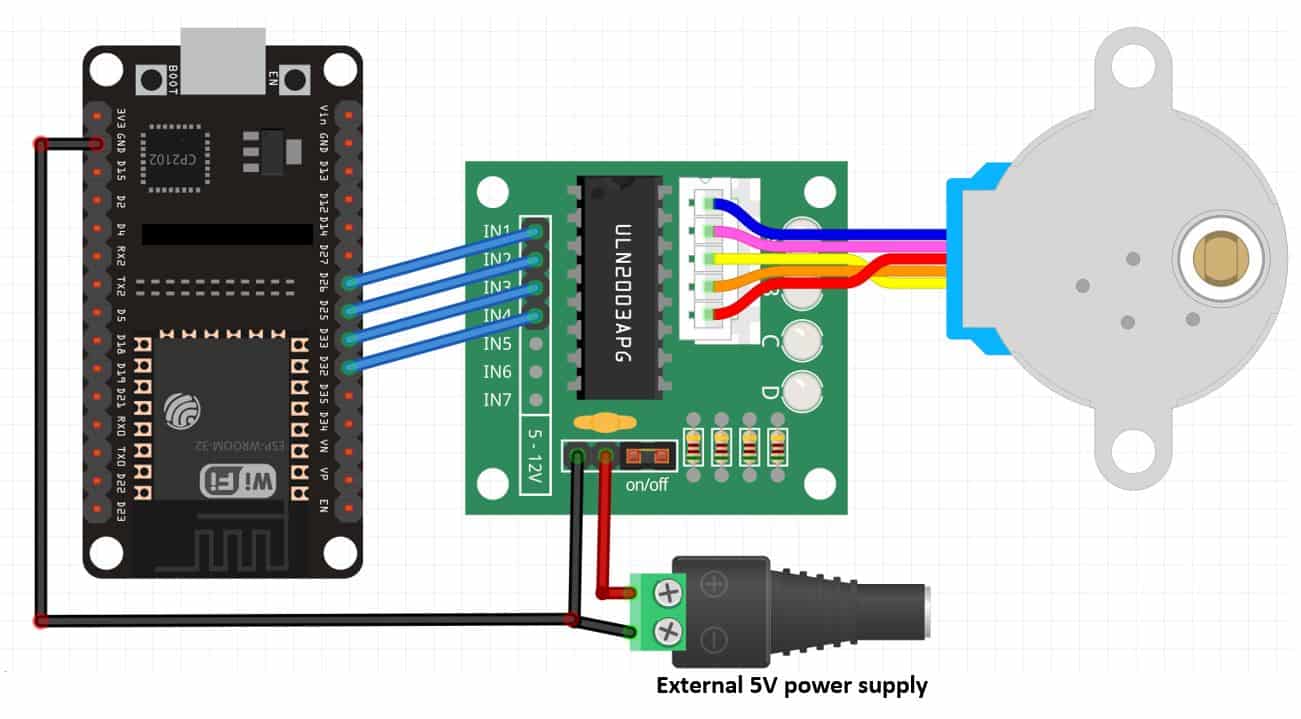
En observant l'mage annimée de la commande du moteur pas à pas, compléter la variable sequence du programme Python
Remarque : il existe différents modes de commande, en alimentant deux bobines ou une bobine à la fois ou en combinant les deux modes pour obtenir un déplacement en demi-pas.
D'après le programme ci-dessus
1. Calculer, pour un moteur PAP effectuant 24 pas par tour, l'angle réalisé pour 1 pas :2. Calculer l'angle parcouru pour 18 pas :
3. Calculer le temps nécessaire pour réaliser les 24 pas, dans le sens horaire. En déduire la vitesse en tr.min-1
Contenu
sous licence CC BY-NC-SA 3.0
Pascal Hassenforder 30/12/2021
MAJ : 27/11/2025
sources : Gwenola LAUNAY - Lycée Jules Ferry
Le blog d'Eskimon