 SCIENCES DE L'INGENIEUR
SCIENCES DE L'INGENIEUR
Niveau : Terminale générale, enseignement de spécialité SI
D
É
C
O
N
N
E
C
T
É
TD1 : Enjambeur électrique autonome (adressage IP)

Le BAKUS-P75S est un enjambeur 100 % électrique dit « intelligent ». Il se veut économique et écologique. Ce type de robot permet de réaliser en autonomie les travaux viticoles. Il remplace le tracteur enjambeur classique et son conducteur. Bakus est en effet capable de tondre, désherber, pulvériser sous le contrôle d’un opérateur à distance. Il peut être également piloté via un smartphone ou toute autre interface homme-machine (IHM).
Pour piloter à distance, le robot BAKUS dispose de huit caméras 3D (deux à chaque coin du véhicule) pour visualiser son environnement, diffuser les données et détecter la présence d’éventuels obstacles. Les caméras sont branchées en réseau et la diffusion de ces données se fait par liaison de type Ethernet via un module de transmission vers une interface externe.
Pour pouvoir communiquer ses informations, l’IHM doit être sur le même réseau que les caméras.
Les figures 6 et 7 illustrent la configuration de l'installation.

L’adresse IP d’une caméra est 192.168.0.69.
Le masque de sous-réseau est 255.255.255.0.
Le routeur nécessite une adresse IP.
Q1. Déterminer l’adresse de sous-réseau. En déduire le nombre d’appareils maximum pouvant être affectés à ce réseau.
L’exigence de visualisation des zones impose 8 caméras 3D, un routeur et 2 tablettes.
Q2. Conclure sur la capacité de la structure informatique à respecter cette exigence de visualisation.
Q3. Attribuer au routeur une adresse IP et un masque de sous-réseau, permettant de communiquer avec la caméra.
Un technicien propose les adresses IP des 8 caméras CAM1 à CAM8, données dans le tableau figure 8.
| Caméra | Adresse IP |
|---|---|
| CAM1 | 192.168.0.69 /24 |
| CAM2 | 192.168.0.42 /24 |
| CAM3 | 192.168.0.255 /16 |
| CAM4 | 192.168.1.84 /24 |
| CAM5 | 192.168.0.0 /24 |
| CAM6 | 192.168.0.20 /24 |
| CAM7 | 192.168.0.69 /24 |
| CAM8 | 192.169.0.54 /24 |
Q4. Indiquer en justifiant, quelles sont les adresses qui ne sont pas compatibles avec la CAM1.
TD2 : HYDROLIENNE (Bus CAN)

Crédits photo : Bertin Technologies
1 - Mise en situation
Les exigences liées à cette problématique sont décrites dans le diagramme de la figure 1.
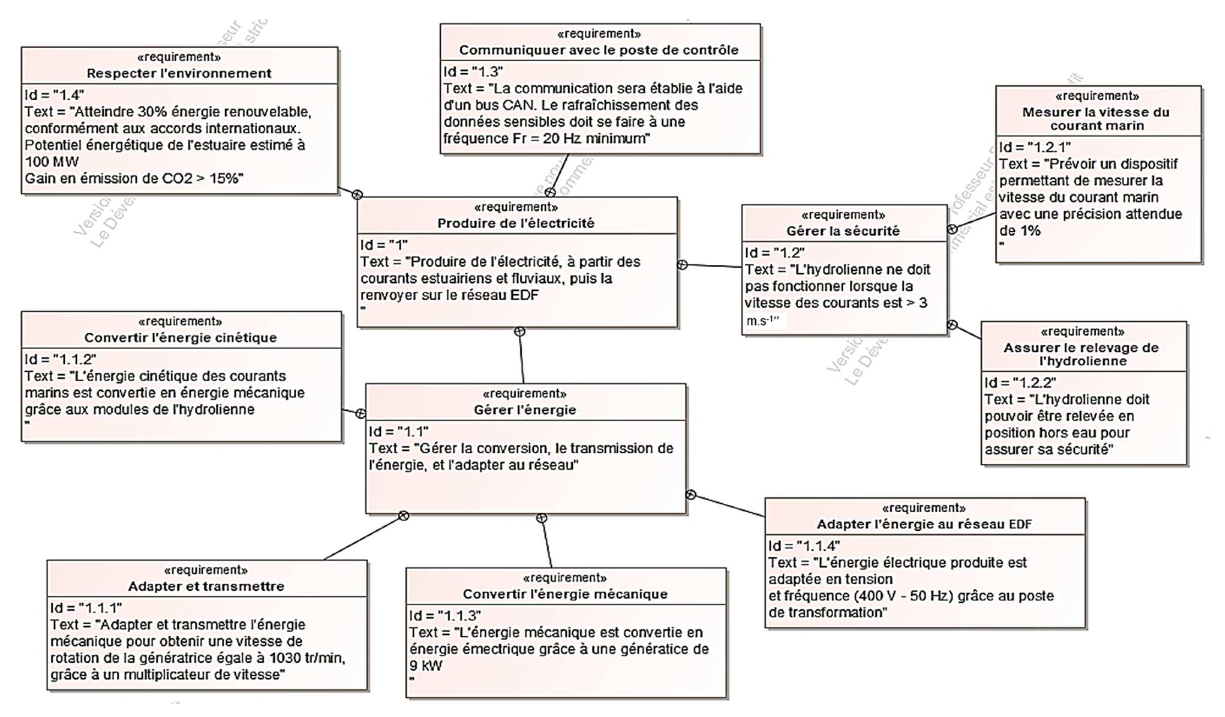
Le projet URABAILA (« Eau qui danse » en basque) est proposé par la société BERTIN, basée à Tarnos (33). Ce projet prévoit d’installer des hydroliennes fluviales à flux transverse dans l’estuaire de la Gironde.
2 - Communication avec le poste de contrôle
L'objectif est de s'assurer de la fréquence de remontée des informations du capteur de vitesse du courant marin quel que soit le fonctionnement de l’hydrolienne.
L’architecture de communication est donnée en figure 2. Un bus CAN est utilisé car il permet une mise en place efficace et rapide en réduisant les coûts de câblage et de maintenance.
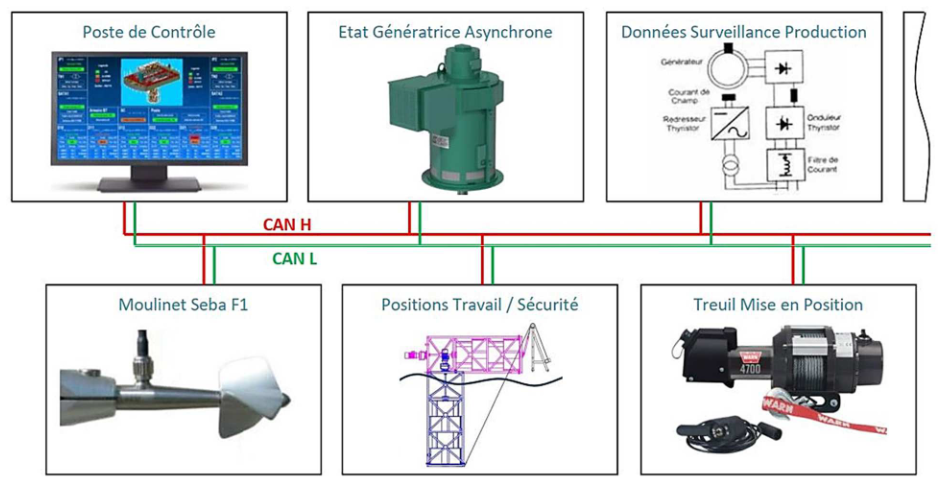
Ce bus CAN fonctionne à une vitesse de 125 kbits·s-1. Il existe deux fréquences d’échange d’informations sur ce bus :
- une plus rapide pour les données dites "sensibles", pour les états des capteurs de vitesse et de fin de course, avec un nombre de données évalué à Ns = 40 par seconde ;
- une autre, pour les données dites non "sensibles", qui demandent une surveillance périodique beaucoup moins fréquente, de l'ordre d’un rafraîchissement par seconde.
Q1. D'après le diagramme des exigences figure 1, relever la fréquence de rafraichissement Fr, puis préciser s'il s'agit de données sensibles ou non.
Un échange complet correspond à une trame de type requête suivie d'une trame réponse. Chaque trame de base nécessite en moyenne deux octets dans le champ de données plus trois bits d'intermission (après fin de trame) comme indiqué figure 3.
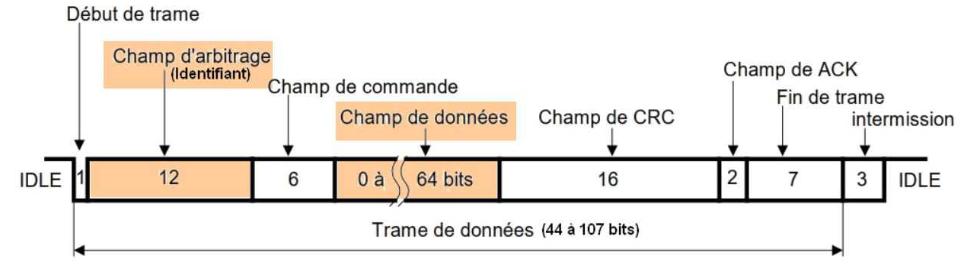
Q2. Calculer Fec la fréquence maximale d'échanges complets (requête + réponse) avec 2 octets de données sur chaque trame, en justifiant vos calculs. Conclure sur le respect du cahier des charges pour la fréquence de rafraîchissement Fr du diagramme des exigences figure 1.
Calcul du nombre de bits pour un échange complet : $square$ 1 bit $rarr$ Début de trame $square$
En conclusion, le bus CAN assure la bonne communication de tous les organes de l’hydrolienne avec le poste de contrôle. Il permet notamment la remontée des informations de sécurité issues du « Moulinet Seba F1 ». Ces données sont codées en Hexadécimal et un exemple de code est donné sur la figure 4.
Requête : Identifiant 0x100 Données (2 octets) |
Réponse : Identifiant 0x159 (réponse vitesse du moulinet Seba) Données (2 octets) : vitesse du courant en cm·s-1(nombre entier non signé) |
|||
Une trame prélevée en phase d'installation sur le bus CAN est donnée en figure 5.
Q3. Repérer sur la trame figure 5 chaque bit 0 et 1 ainsi que les bits de Stuffing en ajoutant un repère S sur le chronogramme.
Q4. Extraire les champs "Identifiant" et "Données" en complétant le document réponse puis donner la signification de cette trame.
| Identifiant en binaire (par quartet) | ||
|---|---|---|
| Identifiant en hexadécimal | ||
| Données en binaire (par quartet) | |||
|---|---|---|---|
| Données en hexadécimal | |||
| Données en décimal | |||
Signification de la trame :
Le dernier relevé de trame sur le bus CAN indique une vitesse du moulinet de 259 cm·s-1. Pour vérifier le bon étalonnage du moulinet et la fiabilité de transmission du bus CAN, un courantomètre étalon donnait une vitesse moyenne du courant marin de 260 cm·s-1 sur la dernière minute d'observation.
Q5. Conclure sur la cohérence du dernier relevé effectué et sur la fréquence de transmission du bus CAN au regard des exigences Id 1.3 et Id 1.2.1 du diagramme des exigences figure 1.
Contenu
sous licence CC BY-NC-SA 3.0
Pascal Hassenforder 15/06/2023
Mise à jour du 16/10/2025