 SCIENCES DE
L'INGENIEUR
SCIENCES DE
L'INGENIEUR
Niveau : Première générale, enseignement de spécialité SI
D
É
C
O
N
N
E
C
T
É
Projecteur scénique
Mise en situation
Le système étudié est un projecteur lyre, utilisé seul ou conjointement à d’autres dispositifs (projecteurs fixes, écrans de fumée, rampes de lumière, ...), il contribue à produire une ambiance lumineuse personnalisée dans des spectacles.


Etude de la communication
Les spectacles peuvent nécessiter une dizaine de projecteurs. Ceux-ci sont alors commandés par un ordinateur permettant de synchroniser l’ensemble des systèmes techniques de la scène. L’objectif de cette étude est de quantifier les performances et de valider la capacité de la fonction communiquer (voir les caractéristiques du réseau de communication sur le document technique 2) à :
- gérer un nombre suffisant d’appareils pour être installés sur une scène professionnelle ;
- transmettre les informations permettant d’exploiter les performances maximales des appareils ;
- transmettre les ordres de commande avec une fréquence de rafraîchissement suffisante fixée à 20 Hz au minimum (période : 50 ms) limite de la persistance rétinienne permettant d’assurer des transitions optiques imperceptibles.
Les informations envoyées de l’ordinateur aux projecteurs transitent par un réseau de communication à la norme DMX512.
Les projecteurs nécessitent 7 mots pour pouvoir être commandés. Une trame du bus DMX512 peut contenir au maximum 512 mots.
Le tableau du document technique 1 donne la liste des commandes que le projecteur reçoit sur la ligne de communication, ainsi que leur signification et leur emplacement dans la trame.
À partir des renseignements sur la structure d’une trame et de la structure du message géré par le projecteur (voir documents techniques 1 et technique 2) :
Q1. Définir le nombre de projecteurs pouvant être géré par un bus DMX512.
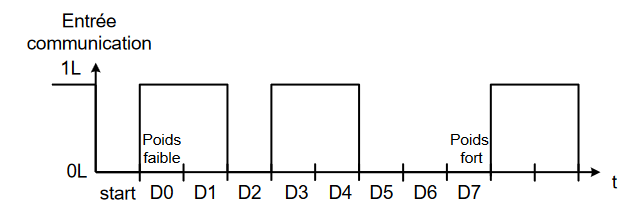
La figure 1 présente une trame transmise et la figure 2 présente le chronogramme du mot 16 de la trame.
| Mot 15 (CH0) | Mot 16 (CH1) | Mot 17 (CH2) | Mot 18 (CH3) | Mot 19 (CH4) | Mot 20 (CH5) | Mot 21 (CH6) |
|---|---|---|---|---|---|---|
| Xxx xxxx | Voir chronogramme fig.2 | Xxx xxxx | Xxx xxxx | Xxx xxxx | Xxx xxxx | Xxx xxxx |
Q2. À l’aide de l’exemple donné sur le document technique 2, donner l’adresse de configuration du projecteur concerné par la trame ci-dessus (fig. 1 et 2).
Q3. Donner la valeur du mot 16, définie par le chronogramme de la fig.2 en hexadécimal et décimal.
Q4. À partir du format du mot Tilt et de la plage de variation (document technique 1) déterminer la résolution de positionnement en degré que permet l’information de positionnement reçue pour l’axe Tilt (résolution = plus petit angle de déplacement).
Q5. En déduire la position angulaire si la valeur transmise dans la trame est égale à 200.
Q6. À partir du document technique 2, déterminer la durée en μs, d’un mot en prenant en compte le format complet (Start, Data, Stop).
Q7. En utilisant la trame trouvée précédemment ainsi que la structure d’une trame complète (début de trame + 512 mots utiles), déterminer la durée de cette trame.
Q8. Conclure quant à la capacité du réseau de communication à répondre au besoin.
Simulateur de pente pour home-trainer
Mise en situation
Lors du premier confinement lié à la pandémie de la covid-19, les sportifs, amateurs comme professionnels, ont dû adapter leurs pratiques afin d'entretenir leur condition physique.
Assez naturellement, les cyclistes ont remplacé leurs sorties d'entrainement sur route par des séances de home-trainer qui consistent à réaliser des exercices spécifiques sur son propre vélo en étant stationnaire (figure 1).

Figure 1 : vélo installé sur un home-trainer.
Depuis quelques années de nouveaux home-trainers, dits connectés, ont fait leur apparition et ont été très largement utilisés lorsqu'il était impossible de pratiquer le cyclisme en extérieur. L'intérêt d'utiliser un tel dispositif est d'avoir en temps réel un certain nombre de données (puissance développée, cadence de pédalage ...) permettant de réaliser des exercices d'entrainement très spécifiques. Par ailleurs, lorsque le home-trainer est connecté à une plateforme d'entraînement en ligne, l'avatar du cycliste va pouvoir évoluer sur un parcours virtuel avec d'autres utilisateurs (figure 2). Ainsi, la pratique du cyclisme sur home-trainer devient ludique et interactive lors d'entrainements en groupe ou bien de compétitions.

Figure 2 : environnement virtuel d'une plateforme d'entrainement.
Dans l'optique de rendre la pratique du cyclisme à la maison toujours plus réaliste, un constructeur de home-trainer a développé un dispositif appelé simulateur de pente. Ce dispositif va permettre d'incliner le vélo afin que le cycliste se trouve dans une position semblable à celle rencontrée lors d'ascensions de côtes ou de cols. Ainsi, le cycliste est amené à modifier naturellement sa position sur le vélo afin de faire travailler spécifiquement les muscles et d'améliorer sa technique de pédalage. La figure 3 illustre les cas d'utilisation du simulateur de pente.

Figure 3 : diagramme de cas d'utilisation.
Fixé sur l'axe de la fourche du vélo, à la place de la roue avant (figure 4), le dispositif va lever ou baisser de manière contrôlée l'avant du vélo afin d'obtenir la déclivité souhaitée.

Figure 4 : échange d'informations au sein de « l'écosystème » du simulateur de pente.
Le simulateur de pente possède deux modes de fonctionnement (manuel ou piloté). En mode manuel, au moyen d'un boitier (figure 5) fixé sur le guidon, le cycliste peut augmenter ou diminuer l'inclinaison à l'aide de deux boutons poussoirs. En mode piloté, lorsque le cycliste utilise une plateforme d'entraînement, le simulateur va incliner le vélo afin de reproduire la déclivité de la route sur laquelle se trouve l'avatar. C'est le home-trainer qui, à partir des informations en provenance de l'application d'entraînement, commande le simulateur de pente.

Figure 5 : boitier de commande utilisateur.
La figure 6 présente les performances attendues du simulateur de pente.

Figure 6 : diagramme des exigences du simulateur de pente.
La problématique traitée dans ce sujet est la suivante : Le simulateur de pente permet-il de reproduire des variations de déclivité réalistes pour le cycliste à partir des informations envoyées par le home-trainer ? La réponse à cette problématique est traitée au travers de trois sous-parties visant à valider les exigences 1, 2, 1.2.2.1 et 1.2.2.2 (figure 6).
Le protocole de communication Bluetooth entre le home-trainer et le simulateur de pente (figure 4) est assimilée à celui d'une liaison série de type RS232.
La transmission débute par un bit de START à 0 logique et se termine par un bit de STOP à 1 logique. Ces deux bits sont encadrés par l'émission de 8 bits de données. Au repos, la ligne est à 1 logique. Le bit de poids faible (LSB) est transmis en tête.
Le codage utilisé fait correspondre un code numérique à chaque caractère transmis, le code standard s'appelle code ASCII et utilise un octet (8 bits) pour coder un caractère.
La table ASCII (figure 7) établit la correspondance entre le code numérique exprimé en decimal (colonne « Décimal ») ou en hexadécimal (colonne « Hex ») avec le caractère associé (colonne « Char »).

Figure 7 : table ASCII.
La communication entre le home-trainer et le simulateur de pente a pour fonction de transmettre la valeur de l'angle de l'inclinaison (par exemple 12.5º) par module Bluetooth du home-trainer à celui du simulateur de pente sous la forme de quatre octets transmises dans l'ordre suivant :
- 1er octet qui correspond au caractère de la valeur de la dizaine de l'angle d'inclinaison ;
- 2ème octet qui correspond au caractère de la valeur de l'unité de l'angle d'inclinaison ;
- 3ème octet qui correspond au caractère du point décimal ;
- 4ème octet qui correspond au caractère de la valeur décimale de l'angle d'inclinaison.
Remarque : Le code correspondant à l'unité de l'angle d'inclinaison, soit « º », est inutile et n'est donc pas transmis au simulateur de pente.
La figure 8 représente la transmission de la trame complète enchaînant les 4 octets.
Figure 8 : transmission de la 1ère trame.
Q1. Donner le code binaire transmis par octet (figure 8). En déduire le code hexadécimal ainsi que le caractère correspondant à la valeur de la dizaine, unité et dizième de l'angle de l'inclinaison à l'aide de la table ASCII (figure 7). En déduire l'angle d'inclinaison transmis.
Q2. À partir de la figure 8, déterminer le nombre de bits Nbits pour transmettre un caractère. En déduire le nombre total de bits Ntot pour transmettre l'ensemble des caractères lié à la valeur de l'angle de l'inclinaison.
Q3. La vitesse de transmission du module Bluetooth étant de 57,6 kbits/s, calculer le temps de transmission ttrans pour la totalité des caractères liée à la valeur de l'angle de l'inclinaison. À l'aide de la figure 6, conclure quant au respect de l'exigence liée à ce temps de transmission.
La commande du moteur, via l'interface de puissance, peut être effectuée de deux manières :
- l'application « plateforme d'entrainement » (figure 4) envoie les ordres de commande par liaison Bluetooth afin d'imposer un angle d'inclinaison correspondant au profil du parcours issue de l'application ;
- le cycliste gère manuellement l'inclinaison (l'application est déconnectée) à l'aide de deux boutons poussoirs gérant la montée ou la descente (figure 9).

Figure 9 : boitier de commande utilisateur.
En mode manuel : un appui sur un des deux boutons poussoirs provoque une variation d'inclinaison de +/- 0,5 º.
Q4. Compléter la fonction change_inclinaison écrite en langage python, permettant de varier l'angle d'inclinaison.
Mise en situation
Lors du premier confinement lié à la pandémie de la covid-19, les sportifs, amateurs comme professionnels, ont dû adapter leurs pratiques afin d'entretenir leur condition physique.
Assez naturellement, les cyclistes ont remplacé leurs sorties d'entrainement sur route par des séances de home-trainer qui consistent à réaliser des exercices spécifiques sur son propre vélo en étant stationnaire (figure 1).
Figure 1 : vélo installé sur un home-trainer.
Depuis quelques années de nouveaux home-trainers, dits connectés, ont fait leur apparition et ont été très largement utilisés lorsqu'il était impossible de pratiquer le cyclisme en extérieur. L'intérêt d'utiliser un tel dispositif est d'avoir en temps réel un certain nombre de données (puissance développée, cadence de pédalage ...) permettant de réaliser des exercices d'entrainement très spécifiques. Par ailleurs, lorsque le home-trainer est connecté à une plateforme d'entraînement en ligne, l'avatar du cycliste va pouvoir évoluer sur un parcours virtuel avec d'autres utilisateurs (figure 2). Ainsi, la pratique du cyclisme sur home-trainer devient ludique et interactive lors d'entrainements en groupe ou bien de compétitions.
Figure 2 : environnement virtuel d'une plateforme d'entrainement.
Dans l'optique de rendre la pratique du cyclisme à la maison toujours plus réaliste, un constructeur de home-trainer a développé un dispositif appelé simulateur de pente. Ce dispositif va permettre d'incliner le vélo afin que le cycliste se trouve dans une position semblable à celle rencontrée lors d'ascensions de côtes ou de cols. Ainsi, le cycliste est amené à modifier naturellement sa position sur le vélo afin de faire travailler spécifiquement les muscles et d'améliorer sa technique de pédalage. La figure 3 illustre les cas d'utilisation du simulateur de pente.
Figure 3 : diagramme de cas d'utilisation.
Fixé sur l'axe de la fourche du vélo, à la place de la roue avant (figure 4), le dispositif va lever ou baisser de manière contrôlée l'avant du vélo afin d'obtenir la déclivité souhaitée.
Figure 4 : échange d'informations au sein de « l'écosystème » du simulateur de pente.
Le simulateur de pente possède deux modes de fonctionnement (manuel ou piloté). En mode manuel, au moyen d'un boitier (figure 5) fixé sur le guidon, le cycliste peut augmenter ou diminuer l'inclinaison à l'aide de deux boutons poussoirs. En mode piloté, lorsque le cycliste utilise une plateforme d'entraînement, le simulateur va incliner le vélo afin de reproduire la déclivité de la route sur laquelle se trouve l'avatar. C'est le home-trainer qui, à partir des informations en provenance de l'application d'entraînement, commande le simulateur de pente.
Figure 5 : boitier de commande utilisateur.
La figure 6 présente les performances attendues du simulateur de pente.
Figure 6 : diagramme des exigences du simulateur de pente.
La problématique traitée dans ce sujet est la suivante : Le simulateur de pente permet-il de reproduire des variations de déclivité réalistes pour le cycliste à partir des informations envoyées par le home-trainer ? La réponse à cette problématique est traitée au travers de trois sous-parties visant à valider les exigences 1, 2, 1.2.2.1 et 1.2.2.2 (figure 6).
Le protocole de communication Bluetooth entre le home-trainer et le simulateur de pente (figure 4) est assimilée à celui d'une liaison série de type RS232.
La transmission débute par un bit de START à 0 logique et se termine par un bit de STOP à 1 logique. Ces deux bits sont encadrés par l'émission de 8 bits de données. Au repos, la ligne est à 1 logique. Le bit de poids faible (LSB) est transmis en tête.
Le codage utilisé fait correspondre un code numérique à chaque caractère transmis, le code standard s'appelle code ASCII et utilise un octet (8 bits) pour coder un caractère.
La table ASCII (figure 7) établit la correspondance entre le code numérique exprimé en decimal (colonne « Décimal ») ou en hexadécimal (colonne « Hex ») avec le caractère associé (colonne « Char »).
Figure 7 : table ASCII.
La communication entre le home-trainer et le simulateur de pente a pour fonction de transmettre la valeur de l'angle de l'inclinaison (par exemple 12.5º) par module Bluetooth du home-trainer à celui du simulateur de pente sous la forme de quatre octets transmises dans l'ordre suivant :
- 1er octet qui correspond au caractère de la valeur de la dizaine de l'angle d'inclinaison ;
- 2ème octet qui correspond au caractère de la valeur de l'unité de l'angle d'inclinaison ;
- 3ème octet qui correspond au caractère du point décimal ;
- 4ème octet qui correspond au caractère de la valeur décimale de l'angle d'inclinaison.
Remarque : Le code correspondant à l'unité de l'angle d'inclinaison, soit « º », est inutile et n'est donc pas transmis au simulateur de pente.
La figure 8 représente la transmission de la trame complète enchaînant les 4 octets.
Figure 8 : transmission de la 1ère trame.
Q1. Donner le code binaire transmis par octet (figure 8). En déduire le code hexadécimal ainsi que le caractère correspondant à la valeur de la dizaine, unité et dizième de l'angle de l'inclinaison à l'aide de la table ASCII (figure 7). En déduire l'angle d'inclinaison transmis.
Q2. À partir de la figure 8, déterminer le nombre de bits Nbits pour transmettre un caractère. En déduire le nombre total de bits Ntot pour transmettre l'ensemble des caractères lié à la valeur de l'angle de l'inclinaison.
Q3. La vitesse de transmission du module Bluetooth étant de 57,6 kbits/s, calculer le temps de transmission ttrans pour la totalité des caractères liée à la valeur de l'angle de l'inclinaison. À l'aide de la figure 6, conclure quant au respect de l'exigence liée à ce temps de transmission.
La commande du moteur, via l'interface de puissance, peut être effectuée de deux manières :
- l'application « plateforme d'entrainement » (figure 4) envoie les ordres de commande par liaison Bluetooth afin d'imposer un angle d'inclinaison correspondant au profil du parcours issue de l'application ;
- le cycliste gère manuellement l'inclinaison (l'application est déconnectée) à l'aide de deux boutons poussoirs gérant la montée ou la descente (figure 9).
Figure 9 : boitier de commande utilisateur.
En mode manuel : un appui sur un des deux boutons poussoirs provoque une variation d'inclinaison de +/- 0,5 º.
Q4. Compléter la fonction change_inclinaison écrite en langage python, permettant de varier l'angle d'inclinaison.
Mise à jour : 21/04/2025