 SCIENCES DE
L'INGENIEUR
SCIENCES DE
L'INGENIEUR
Niveau : Première générale, enseignement de spécialité SI
D
É
C
O
N
N
E
C
T
É
Acquisition de l'information : les capteurs
1. Situation dans les fonctions génériques :
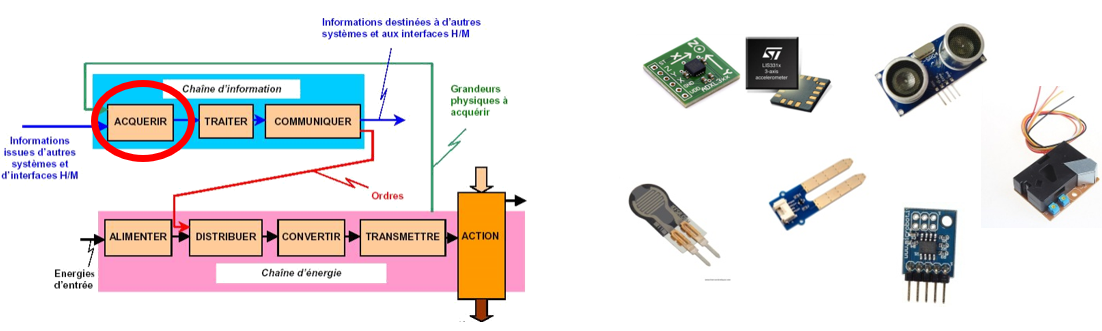
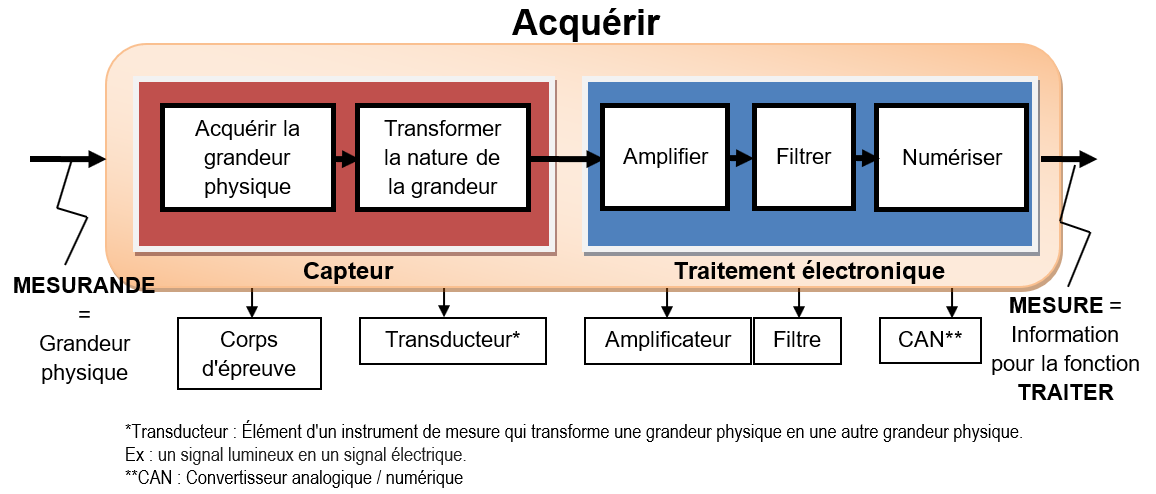
2. Rôle d'un capteur :
Un capteur permet de convertir une grandeur physique (mesurande) en un signal électrique. Ceci permettra un traitement du signal électrique par des structures électroniques à des fins de mesures et/ou de commandes.
3. Les familles de capteurs
3.1. Les capteurs logiques Tout Ou Rien (TOR) :
logique : deux valeurs possibles , aussi désigné tout ou rien (TOR), logique ou binaire. On parle alors de détecteurs qui sont utilisés dans les automatismes séquentiels. Les plus triviaux étant les interrupteurs et boutons-poussoirs

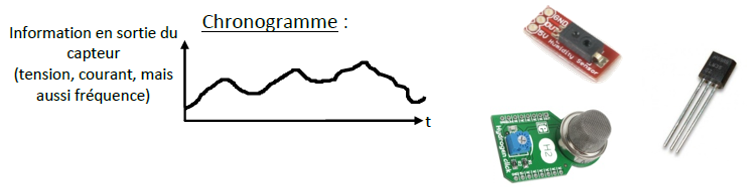
3.2- Les capteurs analogiques :
La grandeur électrique délivrée en sortie par ce type de capteur est en relation directe (le plus souvent proportionnelle) à la grandeur physique à capter. Le signal varie de façon continue au cours du temps et possède une de valeurs possibles dans un intervalle donné.
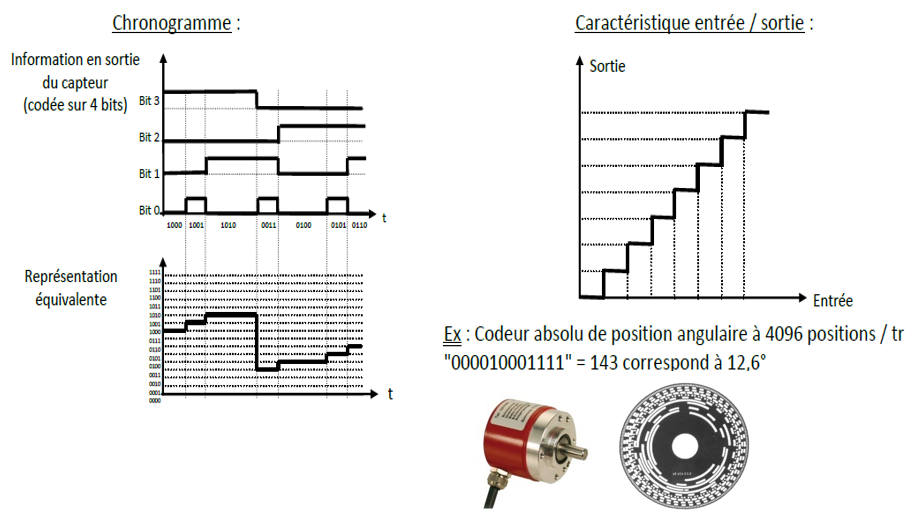
3.3. Les capteurs numériques :
Ce type de capteur délivre en sortie une information électrique à caractère numérique, c’est-à-dire ne pouvant prendre qu’un nombre de valeurs distinctes. Le signal varie de façon discontinue au cours du temps. L’information délivrée par ces capteurs est un code numérique sur plusieurs bits.
4. Types de capteurs :
4.1. Les capteurs passifs :
la grandeur physique d'entrée modifie directement la grandeur électrique passive : une impédance (résistance, la capacité ou l'inductance).
- Variation de résistance : Elle peut être due à une déformation d’un fil de diamètre calibré, ce qui permet de construire des jauges de déformation et, en collant cette dernière à un corps d’épreuve dont le comportement élastique (force → déformation) est précisément prédit, on peut en déduire l'action mécanique qu'il subit. Ce principe est largement appliqué pour des grandeurs à mesurer convertibles en force (pression, masse, densité, viscosité). Ce peut-être le fait d’une modification de température agissant sur l’ensemble des paramètres de la résistance (principe d'une thermistance).
- Variation de capacité : Elle peut être due à une modification des caractéristiques du diélectrique d’un condensateur. Elle est utilisée dans la mesure de niveau, l'hygrométrie. Elle peut provenir d’un déplacement des armatures d’un condensateur associé à l’élément de mesure sous l'effet d'une pression.
- Variation d'inductance : Le déplacement de l’élément sensible modifie la position du noyau ferromagnétique d’une bobine : LVDT (de l'anglais Linear Variable Differential Transformer). Son inductance par conséquent varie.





4.2. Les capteurs actifs :
La grandeur d'entrée ou ses variations génère directement une énergie (tension, courant, charge électrique). Cette énergie étant généralement faible, les capteurs nécessitent tout de même l'utilisation d'amplificateurs.
- Capteurs à effet photoélectrique ou photovoltaïque : basés sur la libération de charges électriques dans la matière sous l'influence d'un rayonnement lumineux, ou plus généralement d’une onde électromagnétique.
Mesure de lumière



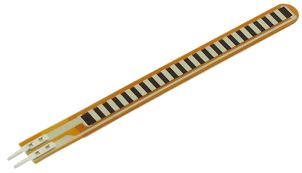
- Capteurs à effet thermoélectriques : basés sur la création d'une tension à la jonction de deux matériaux soumis à une différence de température. Mesure de température (sonde ci-contre)

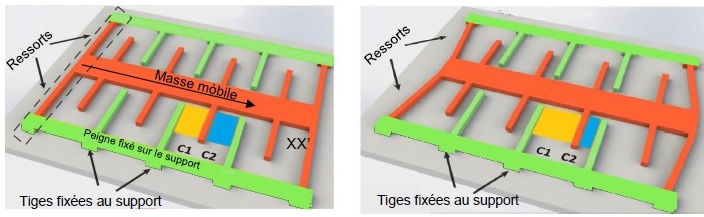
- Capteurs à effet piézoélectrique : L'application d'une contrainte mécanique à certains matériaux dits piézoélectriques (le quartz par exemple) entraîne l'apparition d'une tension entre leurs faces opposées.
Mesure d'effort, d'accélération (représenté ci-dessous)

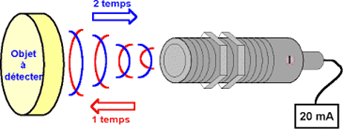
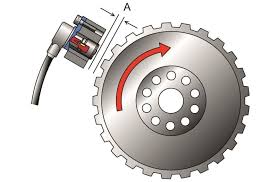
- Capteur à effet d'induction électromagnétique : La variation du flux d'induction magnétique dans un circuit électrique induit une tension électrique aux bornes de ce circuit. Détection de passage d'un objet métallique (détecteur inductif, capteur d'ABS pour automobile)
- Capteur à Effet Hall : Un champ magnétique B et un courant électrique I crées dans un matériau semi-conducteur une tension proportionnelle à B et à I.
Mesure de courant (pince ampèremétrique ci-dessous)

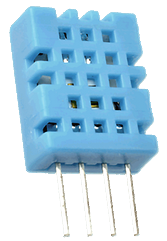
4.3. Les capteurs numériques :
Ils intègrent une chaine d'acquisition sur un unique circuit et pruvent déliver une trame (RS232, I2C...)
Exemple : DHT22 ou DS1820
5. Caractéristiques d’un capteur :
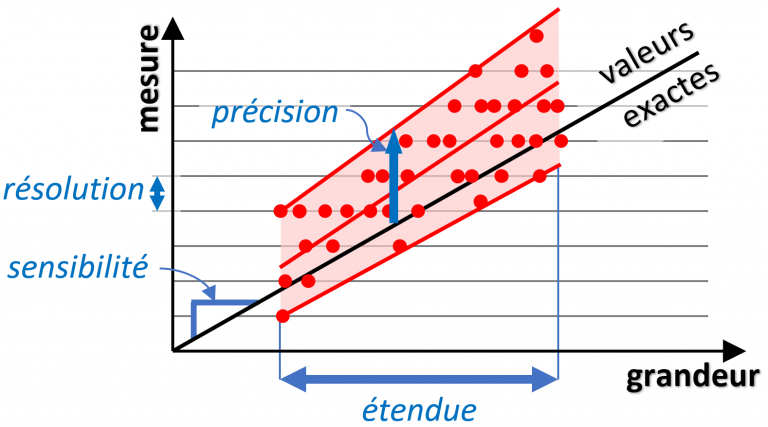
- Etendue de mesure : Valeurs extrêmes pouvant être mesurée par le capteur.
Exemple : le capteur de température LM35 a une étendue de mesure de -10°C à 110°C. - Résolution ou quantum : Plus petite variation de grandeur mesurable par le capteur.
Il se calcule depuis la relation suivante pour un CAN avec n étant le nombre de bits :
Par exemple un accéléromètre 3 axes ADXL 320 3.3V (+/- 5g) connecté à une entrée analogique d'une carte Arduino aura pour résolution ou quantum :
- Sensibilité : Variation du signal de sortie par rapport à la variation du signal d'entrée.

Exemple : le capteur de température LM35 a une étendue de mesure de -10°C à 110°C. - Rapidité : Temps de réaction du capteur.
- Linéarité : représente l'écart de sensibilité sur l'étendue de mesure.
- Précision ou exactitude : Aptitude du capteur à donner une mesure proche de la valeur vraie.
- Justesse : Un capteur est juste si ses valeurs ne changent pas quand on les compare à des valeurs étalon, ou à des valeurs données par d’autres capteurs normalisés.
- Fidélité : Un capteur est fidèle si ses valeurs ne changent pas au cours du temps (mesures reproductibles).
6. Types d’erreurs d’un capteur :
ε=constante
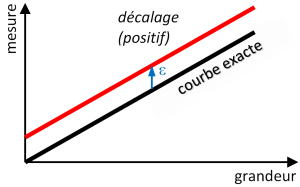
Remarque : une erreur est une valeur algébrique, elle peut donc être négative !
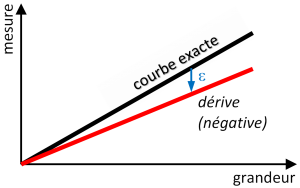
C’est une erreur qui dépend de façon linéaire de la grandeur mesurée :
ε=grandeur×εr
Remarque : combinées entre elles, ces deux erreurs peuvent permettre d’obtenir une relation entre la grandeur X et la mesure x :
x=(1+εr)X+ε
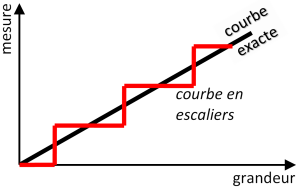
La caractéristique n’est pas une droite.

La caractéristique est « en escalier », cette erreur est souvent due à une numérisation du signal.
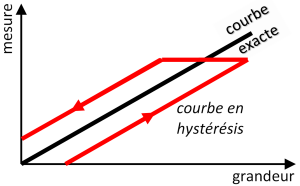
Il y a phénomène d’hystérésis lorsque le résultat de la mesure dépend de la précédente mesure.
Sources : Cours de Denis GUERIN, TSI lycée Eiffel (Dijon), Cours de Christian BISSIERES, Cours de Patrick ABATI
Pascal Hassenforder 31/10/2021