 SCIENCES DE L'INGENIEUR
SCIENCES DE L'INGENIEUR
Niveau : Première générale, enseignement de spécialité SI
D
É
C
O
N
N
E
C
T
É
COMMUNIQUER ENTRE SYSTEMES
1.INTRODUCTION - LIAISON ENTRE DEUX ORDINATEURS

Dès l'apparition des structures de traitement programmées, s'est fait ressentir le besoin de transmettre des informations numériques de manière sûre entre deux équipements.
Deux modes de transmissions se sont très vite imposés.
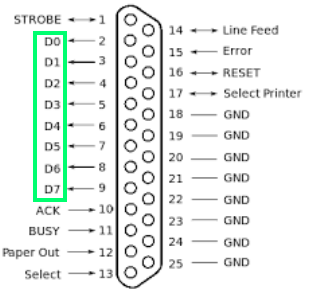
2. TRANSMISSION DES DONNÉES EN PARALLÈLE (EX: CENTRONICS)
Les octets (D0-D7) formant l'information numérique sont transmis en même temps (parallèle). Le protocole le plus couramment utilisé est le protocole CENTRONICS. Ce moyen de transmission était utilisé particulièrement pour la liaison Ordinateur (PC) et imprimante.

3. TRANSMISSION DES DONNÉES EN SÉRIE
3.1. Le protocole série RS232
Lorsque 2 systèmes communiquent entre eux, deux fils électriques suffisent pour transporter les données :
- TX : Transmission des données séries
- RX : Réception des données séries
Un troisième le fil électrique est nécessaire : GND, la masse ou 0V afin que les systèmes aient la même référence.


Nota : Il existe des broches supplémentaire de contrôle de flux (RTS - CTS par exemple) qui ne seront pas étudiés
Lors d'une transmission en série les différents bits d'un mot sont transmis les uns après les autres sur un fil. Pour synchroniser le récepteur et l'émetteur, des bits sont rajoutées aux données. Ces bits sont :
- le bit de START : C'est lui qui signale le début d'une nouvelle donnée (7 ou 8 bits)
- le bit de parité : il n'est pas forcément présent. Il s'agit d'un bit placé avant le bit de stop et qui permet de vérifier si la donnée à été correctement transmise. Si le nombre de bits à "1" était pair le bit de parité est à un. Le bit de parité peut être en logique positive (EVEN) ou négative (ODD).
- les bits de STOP : ils sont à 1 ou 2. Ils signalent la fin de l'octet transmis
- MARK : il s'agit de l'état de repos en l'absence de transmission.
La distance dépend de la vitesse de transmission : jusqu'à 533m à 1200bauds (bits/seconde) ou 76m à 9600 bauds par exemple
Exemple de capture d'une trame complète RS232 :
Pour que les systèmes puissent se comprendre il faut les configurer pour qu'ils aient les mêmes vitesses en bauds, longueurs des bits, nombre de bits de stop et parité identique.
- Longueur des mots 7 bits.
- 2 bits de stop.
- Pas de parité.
- Vitesse de transmission 1200 Bauds.
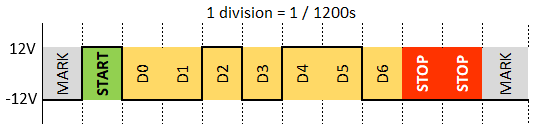
Au repos (MARK), la ligne est à -12V et la transmission commence par le bit de start à 12V, suivi des 7 bits en commençant par le bit de poids faible D0, puis 2 bits de stop et la ligne repasse au repos (MARK)
Pour décoder les données : 
- -12V correspond à un niveau lofique 1
- 12V correspond au niveau logique 0
Quelle est la valeur de l'octet transmis en binaire, en décimal et le caractère ASCII envoyé ?
3.2. Liaison RS232 entre 2 microcontrôleurs
Exemple de connexion entre 2 arduinos
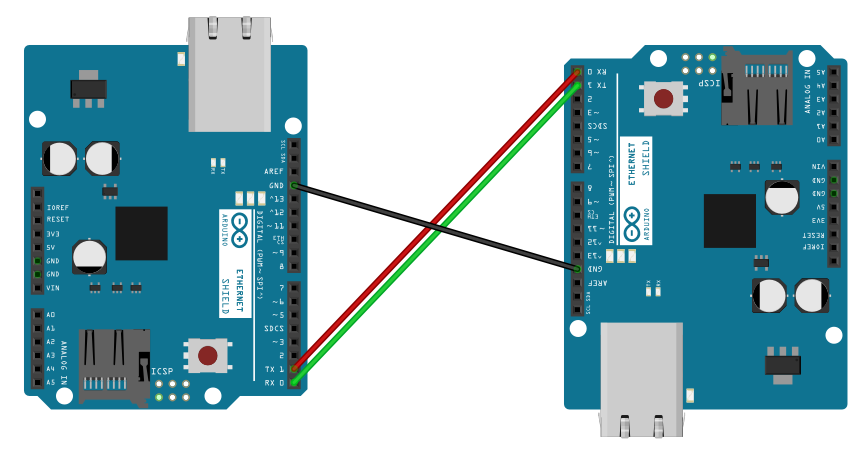
Les microcontrôleurs étant alimentés par des tensions 5V ou 3.3V, pour simplifier la transmission des données par nivaux logiques, le -12V précédent correspondra au niveau 1 logique et +12V au niveau 0.
Capture de la même trame envoyée par l'arduino :

3.3. Exercice d'entraînement
Décodez la trame RS232 (niveaux logiques)
format de la trame :
- Format des données(bit) : 8 bits
- Bit de parité : Aucun
Donnée envoyée ou transmise en hexadécimal....0x
Remarque : Lorsque plusieurs octets sont envoyés des bits de start et stop les séparent
3.4. Durée de transmission d'une trame
La durée va dépendre du format de la trame.
Exemple:
- Vitesse de transmission : 9600 bauds
- Format des données(bit) : 8 bits
- Nombre de bits de stop : 1 bits
- Bit de parité : aucun
La trame est donc composée d'1 bit de start, 8 bits de données et d'1 bit de stop, pour chaque octet transmis
A la vitesse de 9600 bits par seconde l'émetteur va envoyer 9600/10 = 960 octet/s
Pour transmettre 1 Mo il faudrait 106/960 secondes
donc 1042 secondes environ.
Conclusion : ce mode de transmission n'est pas adapté au transfert de fichiers informatiques mais uniquement au transfert de quelques octets.
4. Exercice :
Transmission de la position de l’engin et stockage de l’information vidéo
Objectifs de cette partie : analyser les contraintes de transmission de la position de l'engin sous-marin et du stockage de l'information vidéo. Il s'agit également de vérifier la cohérence des techniques utilisées lors de la mission d'inspection.

Le contrôle du positionnement de l'engin est réalisé à l'aide d'une centrale inertielle de type XSENS MTx-28 A53 G25 à technologie MEMS (Micro Electro-Mechanical Systems) donnant des informations de position à l'aide de 9 capteurs : 3 accéléromètres (accélération linéaire), 3 gyromètres (vitesse angulaire), 3 magnétomètres (intensité du champ magnétique terrestre)) répartis sur les trois axes d'un trièdre de mesure 3D.

Figure 17 : trièdre de mesure et trièdre de positionnement absolu
À tout moment, le système est capable de comparer son positionnement par rapport au tracé du chemin de câble stocké dans l'unité centrale. Les différentes informations en provenance des capteurs sont mesurées par rapport au trièdre relatif à la plateforme sur laquelle repose le dispositif (voir figure 17).
Pour utiliser les informations, il est nécessaire de les convertir dans un trièdre de référence ; il faut donc effectuer un changement de repère, ce que réalise la centrale MTx-28 A53 G25.
La sortie des données se fait sous forme d’un tableau comportant 3 paramètres pour l'accélération, 3 paramètres pour la giration et 3 paramètres pour l'intensité du champ magnétique terrestre. Les données du tableau sont transmises via une liaison de type série asynchrone à la carte unité centrale qui calcule alors la position de l'AUV. Une trame de données est transmise à intervalles réguliers au bateau suiveur pour vérification de la position et du bon fonctionnement de la centrale inertielle.
La configuration choisie par l'utilisateur est une sortie calibrée (de type appelé« matrice de rotation » - voir DT6 -) avec horodatage des données (Time Stamp).
Q1. En se référant à la documentation de la centrale XSENS (document technique DT6), donner les valeurs hexadécimales des champs PRE, BID, MID. Calculer le nombre d’octets nécessaire à la transmission des informations des 9 capteurs. À partir de ce nombre, et en considérant l’ajout de l’octet TS, donner, en hexadécimal, la valeur de LEN. Calculer alors le nombre d'octets (byte, en anglais) Noctets nécessaire à la transmission de ce message.
Une trame de données, via un modem acoustique, est transmise tous les 250 mètres au bateau suiveur pour vérification de la position et du bon fonctionnement de la centrale inertielle. La liaison modem acoustique/bateau suiveur possède les caractéristiques suivantes :
| Réglages | Valeurs |
|---|---|
| Vitesse de transmission (bit/s ou bps) | 2400 |
| Format des données (bit) | 8 |
| Bit de parité | sans |
| Bits de stop | 2 |
| Contrôle de flux | sans |

Figure 18 : format de la trame de la liaison série asynchrone
Q2. Sachant que chaque trame est composée de 42 octets et connaissant la vitesse Vtrans du modem acoustique (tableau de caractéristiques relatif au format d'une liaison série figure 18), en considérant que la célérité du son Cson dans l'eau est de 1500 m.s-1, estimer la durée ttrans de la transmission d'une trame de données de positionnement vers le bateau suiveur s'il est situé à une distance d égale à 500 m.
Q3.Décodez le tramme partielle suivante :
Contenu
sous licence CC BY-NC-SA 3.0
Pascal Hassenforder 03/05/2021
MAJ le 20/03/2025