 SCIENCES DE
L'INGENIEUR
SCIENCES DE
L'INGENIEUR
Niveau : Première générale, enseignement de spécialité SI
D
É
C
O
N
N
E
C
T
É
TD : Acquisition de l'information
Exercice 1 : Drone
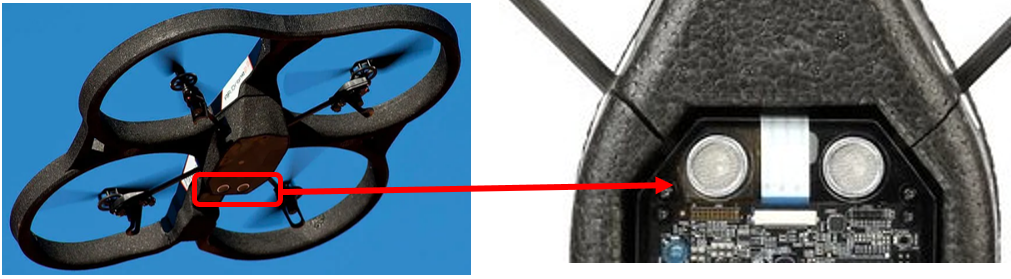
L’AR drone de Parrot possède un capteur de distance permettant de contrôler l’altitude du drone.
Ses caractéristiques sont données par le tableau suivant :
| Tension d’alimentation | 3.2~5.2V |
|---|---|
| Courant de fonctionnement | 8mA |
| Fréquence ultrasonique | 40kHz |
| Plage de mesure | 2-350cm |
| résolution | 1cm |
| Type de sortie | Impulsion en ms |
| Taille du capteur | 50mm X 25mm X 16mm |
| Poids du capteur | 13g |
| Angle de mesure | 15 degrés |
| Température de fonctionnement | -10 à 60 °C |
Les simulations donnent les résultats suivants :
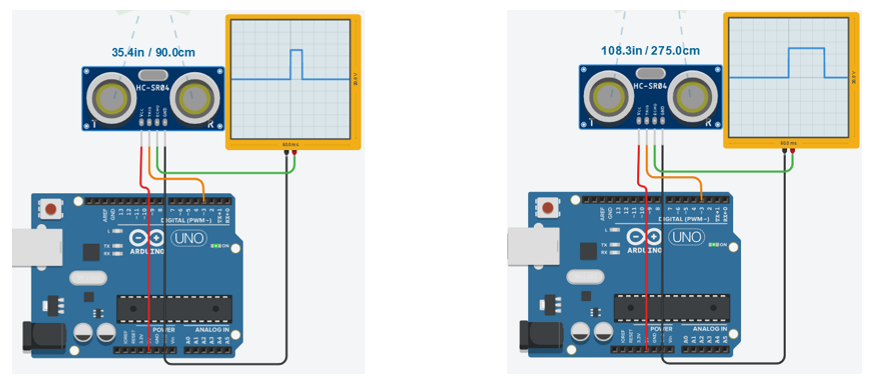
Les échèles sont les suivantes : 5ms/division pour les temps (axe X) et 2V/division pour la tension (axe Y)
Quelle est la tension d'alimentation du capteur ?
On donne la relation suivante permettant de calculer la distance en fonction de la durée de l’impulsion haute.
- $Dist\anc\e=(duree\ de\ l'impu\lsion * vitesse\ du\ son)/2$
La durée de l’impulsion est en secondes et la vitesse du son en m.s-1
Compléter le tableau ci-dessous :
| Distance simulée (m) | durée de l'impusion (s) | distance calculée (m) | Erreur (m) |
|---|---|---|---|
| 0,90 | |||
| 2,75 |
Que peut-on dire sur le type d’erreur du capteur ?
Exercice 2 : Thermomètre
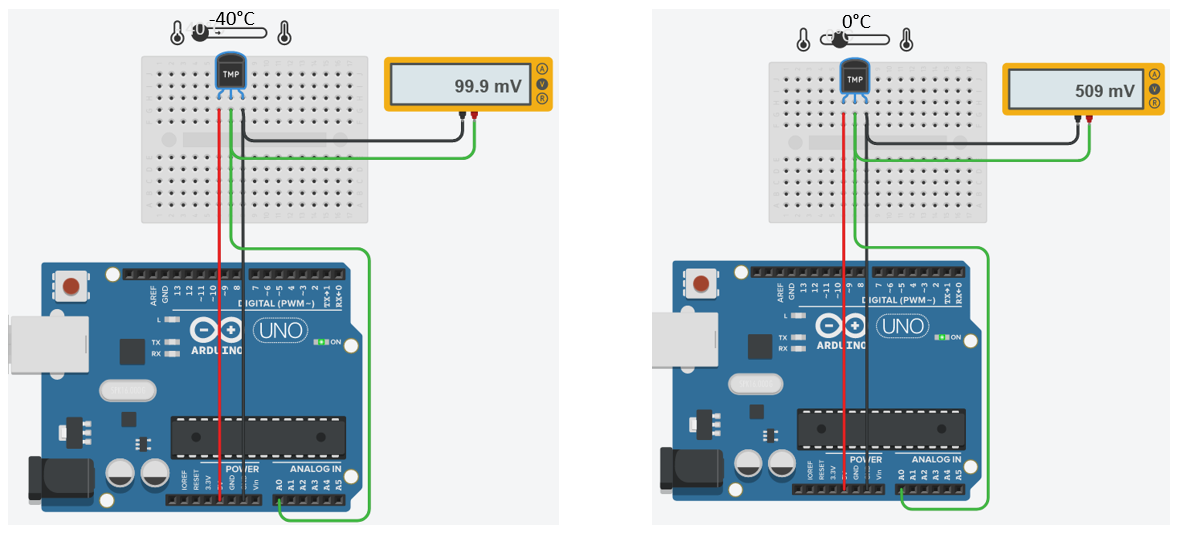
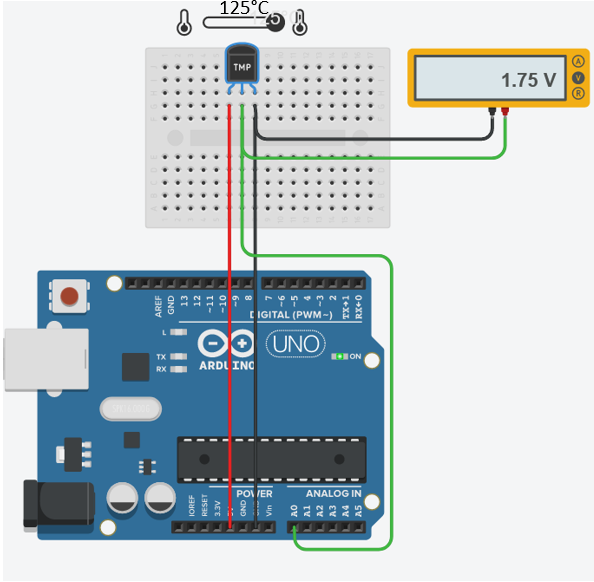
Complétez le tableau ci-dessous
| Température (°C) | Tension (V) |
|---|---|
Ce capteur fait partie de quelle famille ?
Montrez par calcul que la sensibilité du capteur est de 10mV/°C
La sensibilité du capteur correspond au coefficient directeur de la droite : $s=Delta_(s o r t i e)/Delta_(entrée)$
Le graphique ci dessous représente l'évolution de la tension en fonction de la température.
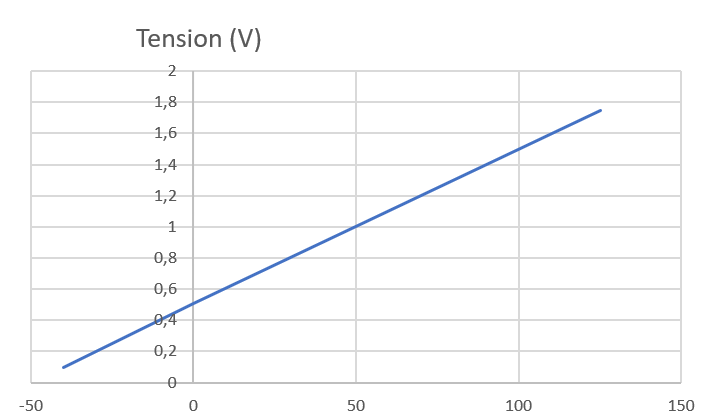
Relever graphiquement la valeur de la tension délivrée par le capteur lorsque la température est de 50°C
Le capteur est connecté à l’entrée analogique A0 du microcontrôleur Arduino. Celui-ci possède un convertisseur analogique numérique 10 bits. Sa tension de référence Vref = 5V.
Calculez le quantum, puis la sensibilité numérique en °C. Cette méthode engendrera quel type d'erreur ?
Le quantum est donné par le relation suivante : $q=?/?$ Calcul de la sensibilité numérique en degré Celsius : $sn = ?$ Conclusion :
Exercice 3 : Pesée de cartouche de gaz

Les cartouches de gaz CV360 sont utilisée dans les lampes à souder par exemple. Le système représenté ci-dessous permet de vérifier le poids des cartouches après remplissage de celles-ci.
- Pour cela un capteur de force transforme le poids en une tension Ve proportionnelle à celui-ci,
- elle est ensuite convertie par un CAN en un signal numérique N sur 7 bits (b0 à b6),
- elle est traitée par un microcontrôleur qui commandera le remplissage et l'éjection des cartouches remplies.

Caractéristiques des compsants :
- Poids des cartouches
- Cartouche vide : 52g
- Cartouche pleine : 110g
- Capteur de poids
- Ve = 0 V pour un poids de 0g,
- Ve = 4 V pour un poids de 100g.
- Convertisseur Analogique Numérique (CAN) :
- Vref = 5V
- Nombre de bits n = 7
- Losque la cartouche vide est détectée,
- on actionne l'électrovanne de remplissage de gaz EVR
- lorsque la cartouche est pleine,
- on désactive EVR puis on active l'électrovanne d'éjection de cartouche EVE
- on attend 1s
- on désactive EVE
Mise en forme du signal :
Q1. D'après les caractéristiques du capteur de poids, calculer sa sensibilité en V/g
La sensibilité du capteur correspond au coefficient directeur de la droite : $s=Delta_(s o r t i e)/Delta_(entrée)$
Convertisseur analogique numérique
Q2. D'après le nombre de bits utilisés par le convertisseur analogique numérique, calculer la résolution (le quantum) lorsque la tension Vref = 5V
Calcul du quantum : $q = ?$
Q3. Démontrez que la sensibilité numérique est inférieure à 1 gramme
Calcul de la sensibilité numérique : $sn = ?$
Q4. Calculer le poids maximal mesurable, lorsque la tension en sortie du capteur U = 5V
Calcul du poids maximal lorsque U = 5V : $p\max = ?$
Q5. Déterminer les codes décimaux Nvide pour une cartouche vide puis Npleine pour le poids d'une cartouche pleine.
Calcul de la valeur décimale convertie d'une cartouche vide :
Comparateur et logique
Q6. Lors d'une mesure, le CAN indique un code binaire N = 0b 100 0010. La cartouche est-elle vide, pleine ou en cours de remplissage ? Précisez dans ce cas les états logiques des sorties EVE et EVR du microcontrôleur ?
Calcul du poids de la cartouche :
Q7. Compléter l'algorigramme ci-dessous correspondant à la description du fonctionnement suivant :

Exercice 4 : Robot anti-incendie


Le robot est contrôlé à distance par un opérateur à l’aide d’un pupitre de commande.
Il est constitué d’une turbine Magirus portée par un tracteur à chenilles.
Lors de son déplacement sur une pente ou un devers, il faut contrôler son l'inclinaison afin d'éviter qu'il ne se renverse.
L'angle maximal en pente est limité à 20° en montée, 30° en descente et à 15° en dévers (voir figure ci-dessous)

La figure ci-dessous représente les deux axes de cet inclinomètre et la caractéristique obtenue pour la plage de mesure de -45° à +45° de chaque angle. Le signal obtenu est une tension US variant de 0 à 5 V, représentative de l’angle d’inclinaison.
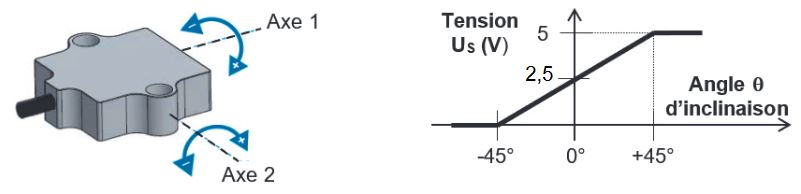
Q1. À partir de la caractéristique de l’inclinomètre, établir l’équation de la tension US en fonction de l’angle θ pour la plage de mesure [-45°,+45°] de cet inclinomètre.
L'équation d'une droite affine est de la forme : $Us = a*Theta + b$ Calcul de la pente a de la droite (sensibilité du capteur) : $a = ?$ Calcul de b (l'ordonnée à l'origine): En partant de l'équation initiale on remplace Us, a et $Theta$ : $Us = a*Theta + b$
Q2. A partir de l'équation précédente, calculer les tensions délivrées par le capteur pour les angles suivants
Un convertisseur analogique numérique CAN permet de numériser la tension US (tension variant de 0 à 5 V issue de l’inclinomètre) en un signal numérique N codé sur 10 bits, représentatif de l’angle de roulis θR ou l'angle de tangage θT selon l'axe.
Le diagramme de blocs internes [ibd] de la chaîne d’information est donné ci-dessous

Q3. Préciser la nature du flux d'information correspondant aux points A, B et C de la figure 5 (analogique ou numérique).
Q4. Après avoir calculé le quantum du CAN, compléter le tableau donnant les différentes valeurs de tension US et N issues de la numérisation (valeurs de N en décimal, puis en binaire).
Calcul du quantum : $q = ?
| Angle | tension | Signal numérique N (sur 10 bits) | |
|---|---|---|---|
| Décimal | binaire | ||
| +45° | 1023 | ||
| +20° | |||
| +15° | |||
| 0° | |||
| -15° | |||
| -30° | |||
| -45° | |||
Q5. Montrer que la précision en degré issue de la numérisation de l’angle de roulis θR est inférieure à 0,1° conformément au cahier des charges.
Calcul de la précision ou sensibilité numérique : $sn = ?$
Q6. Compléter l'algorithme suivant en remplaçant les ?, afin de faire retentir 2 alarmes sonores différentes (ALARME1 ou ALARME2) lorsque les angles maximums de roulis θR ou de tangage θT sont dépassés.
- NR représente la valeur convertie par le CAN de l'angle de roulis,
- NT représente la valeur convertie par le CAN de l'angle de tangage.
Pascal Hassenforder 19/01/2022
Mise à jour : 05/01/2025